
Chyba formátu e-mailu
emailCannotEmpty
emailDoesExist
pwdLetterLimtTip
inconsistentPwd
resetAccountPassword
forTheAccount
pwdLetterLimtTip
inconsistentPwd
resetSuccess
resetSuccessTips
login


Špecifická strktúra servo
2024-04-29 16:44:08
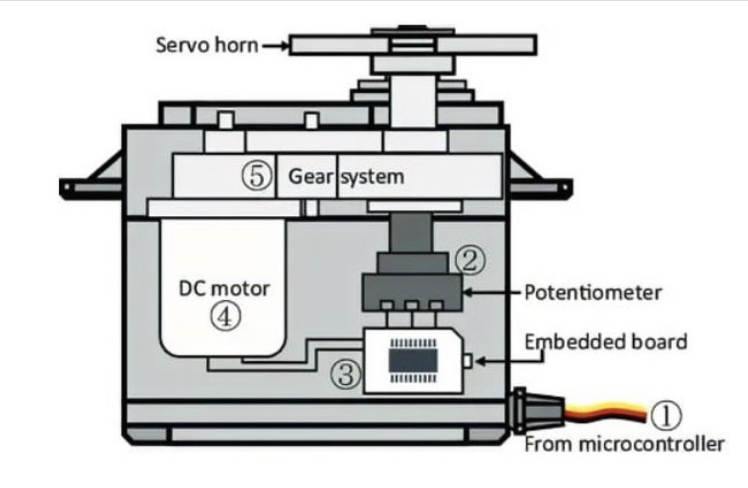
Špecifická štruktúra servo je nasledovná:
①: Signálna línia: Prijímajte riadiaci signál z mikrokontroléra;
②: Potentiometer: Môže zmerať polohu výstupného hriadeľa, ktorý patrí do
Spätná väzba celého mechanizmu servo;
③: Interný ovládač: Spracovanie signálu z vonkajšieho ovládania, riadenie motora a
Spracovanie signálu spätnej väzby, je jadrom celého mechanizmu servo.
④: Motor: Ako ovládač, koľko rýchlosti, krútiaceho momentu, polohy je výstup;
⑤: Mechanizmus prenosu/servopohaty: Tento mechanizmus škáluje výstupný zdvih
motor do konečného uhla výstupu podľa určitého pomeru prenosu;
Výstup servo je riadený odoslaním signálu PWM na signálnu líniu servo.
①: Signálna línia: Prijímajte riadiaci signál z mikrokontroléra;
②: Potentiometer: Môže zmerať polohu výstupného hriadeľa, ktorý patrí do
Spätná väzba celého mechanizmu servo;
③: Interný ovládač: Spracovanie signálu z vonkajšieho ovládania, riadenie motora a
Spracovanie signálu spätnej väzby, je jadrom celého mechanizmu servo.
④: Motor: Ako ovládač, koľko rýchlosti, krútiaceho momentu, polohy je výstup;
⑤: Mechanizmus prenosu/servopohaty: Tento mechanizmus škáluje výstupný zdvih
motor do konečného uhla výstupu podľa určitého pomeru prenosu;
Výstup servo je riadený odoslaním signálu PWM na signálnu líniu servo.
Kontaktuj nás
ZNAČKY PRODUKTOV
Kontaktuj nás
Prosím, uveďte svoj dopyt vo formulári nižšie. Odpovieme vám do 24 hodín.